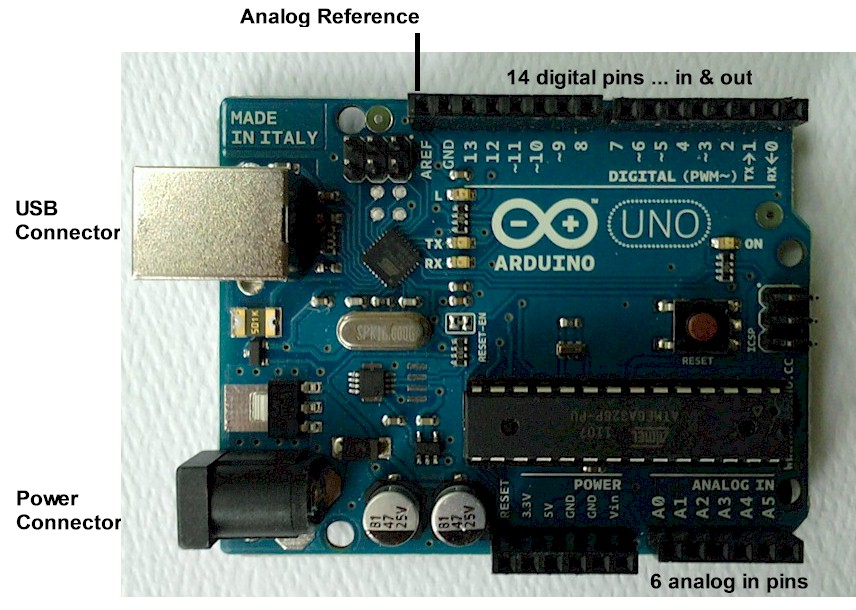
mBot 與 Arduino 的 pin 0 及 1 都是被用於 USB 通訊用,主要用於下載韌體 (firmware),所謂韌體、硬體和軟體的差異,簡單的說,硬體是純電子電路,軟體則與電子電路無關,而韌體是介於軟體與硬體之間,它主要是在直接控制硬體的。
// (C) 2015, Bridan Wang, CC BY-NC-SA 3.0 TW
// http://4rdp.blogspot.tw/search/label/ROSA%20(Arduino)
// pin 0,1 USB, BT
#define TARGET mBot
#if TARGET == mBot
#define BAUD 115200 // for mBlock
#elif TARGET == motoduino
#define BAUD 57600
#elif TARGET == UNO
#define BAUD 115200
void setup() {
// pin 0,1
// Open serial communications and wait for port to open:
Serial.begin(BAUD);
while (!Serial) {}; // wait for serial port to connect.
Serial.println("Welcome to ROSA!");
}
void loop() {
}